

电磁抓手设计关键因素研究
能源与动力工程
资助企业:
 上海桥田智能设备有限公司
上海桥田智能设备有限公司
资助年份: 2025
企业导师: 陈坤

指导教师: 张亚欧
项目成员: 周桓任 熊骁 张惟捷
 项目海报
项目海报

 项目视频
项目视频
 项目简介
项目简介
项目概述
在智能制造等工业领域中,电磁抓手因其非接触式操作优势得到了广泛的应用。但其吸附力难以直接观测的特性易引发过热、过载等潜在安全隐患,造成抓取物脱落等现象,直接影响工件抓取稳定性与生产安全性。因此,探究电磁抓手吸力的影响因素为进一步优化电磁抓手的性能,以适应不同工作场景起到了至关重要的作用。本项目针对桥田智能设备有限公司开发的EMG电磁抓手设备,通过完成理论分析、实验验证和建模仿真,系统揭示了温度与间隙、接触界面材料特性以及励磁参数对吸附力的动态影响机制。基于以上探究设计并完成DOE 实验,提出优化设计方案。最终提出一套适用于多种工业场景的电磁抓手设计方案。
项目目标
(1) 实验验证多种环境条件下的热-磁耦合关系,测试不同温度和间隙组合下吸力的变化情况,对比修正温度和间隙-吸力模型。
(2) 完成接触面积、粗糙度与工件材料特性对吸力关系的有限元仿真,分析得到不同接触面积与材料特性条件下的磁场分布特性。
(3) 实验验证接触面积、粗糙度与材料特性的影响规律,测试多种接触面积与材料特性组合下的吸力变化情况,对比修正接触面积和材料特性-吸力模型。
(4) 完成励磁电流对吸力关系的有限元仿真,得到励磁电流与吸力之间的拟合曲线。
(5) 实验验证励磁电流大小的影响规律,测试不同励磁条件下的吸力变化情况,对比修正励磁电流-吸力模型。
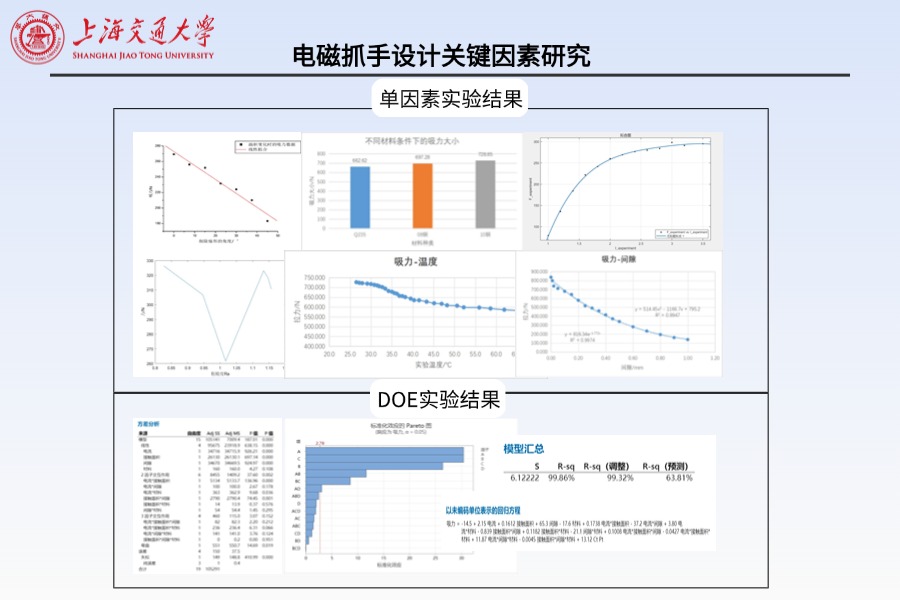
(6) 基于仿真与测试结论,针对关键因素设计并完成DOE实验,根据各因素耦合作用对电磁抓手吸力的影响情况,探究影响抓手吸力的决定性因素。
(7) 综合考虑六个主要影响因素,基于DOE实验情况,提出针对不同实际工况下电磁抓手的控制策略,以提升抓手对于不同任务种类的适应性。
项目成果
本项目系统研究了温度、间隙、接触特性、材料属性等多因素耦合作用对电磁抓手吸附力的影响机制,通过有限元仿真与实验测试相结合的方法,建立关键参数与吸附力的定量关系模型,最终形成适应不同工况的电磁抓手优化控制策略。其意义在于提升电磁抓手在复杂工业环境中的吸附稳定性与安全可靠性,有效解决因吸力不足导致的工件脱落问题,助力桥田公司突破电磁抓手的核心技术瓶颈,增强其在智能制造领域的市场竞争力。




