

人工智能驱动的双臂机械手在先进工业自动化中的应用
机械工程
资助企业:
 深圳慧智星晨科技有限公司
深圳慧智星晨科技有限公司
资助年份: 2025
企业导师: 张云飞

指导教师: 李潇
项目成员: 陈剑杰 郑伟剑 陈宇轩 韩羿鑫
 项目海报
项目海报

 项目视频
项目视频
 项目简介
项目简介
项目概述
本项目的主题为“人工智能驱动的双臂机械手在先进工业自动化中的应用”,聚焦于当前工业分拣场景中面临的多机械臂协作难、交互不自然和大型物体操作困难等问题。项目基于人工智能技术,设计并实现了一套多臂协作控制系统,涵盖感知、控制仿真、元技能及智能体等多个模块,旨在提升机械臂在复杂工业环境下的智能化与灵活性。系统依托于视觉感知与语言理解能力,集成控制仿真平台与实际硬件实验平台,结合虚实融合方案,构建完整的从任务理解、操作规划到动作执行的闭环流程。
项目目标
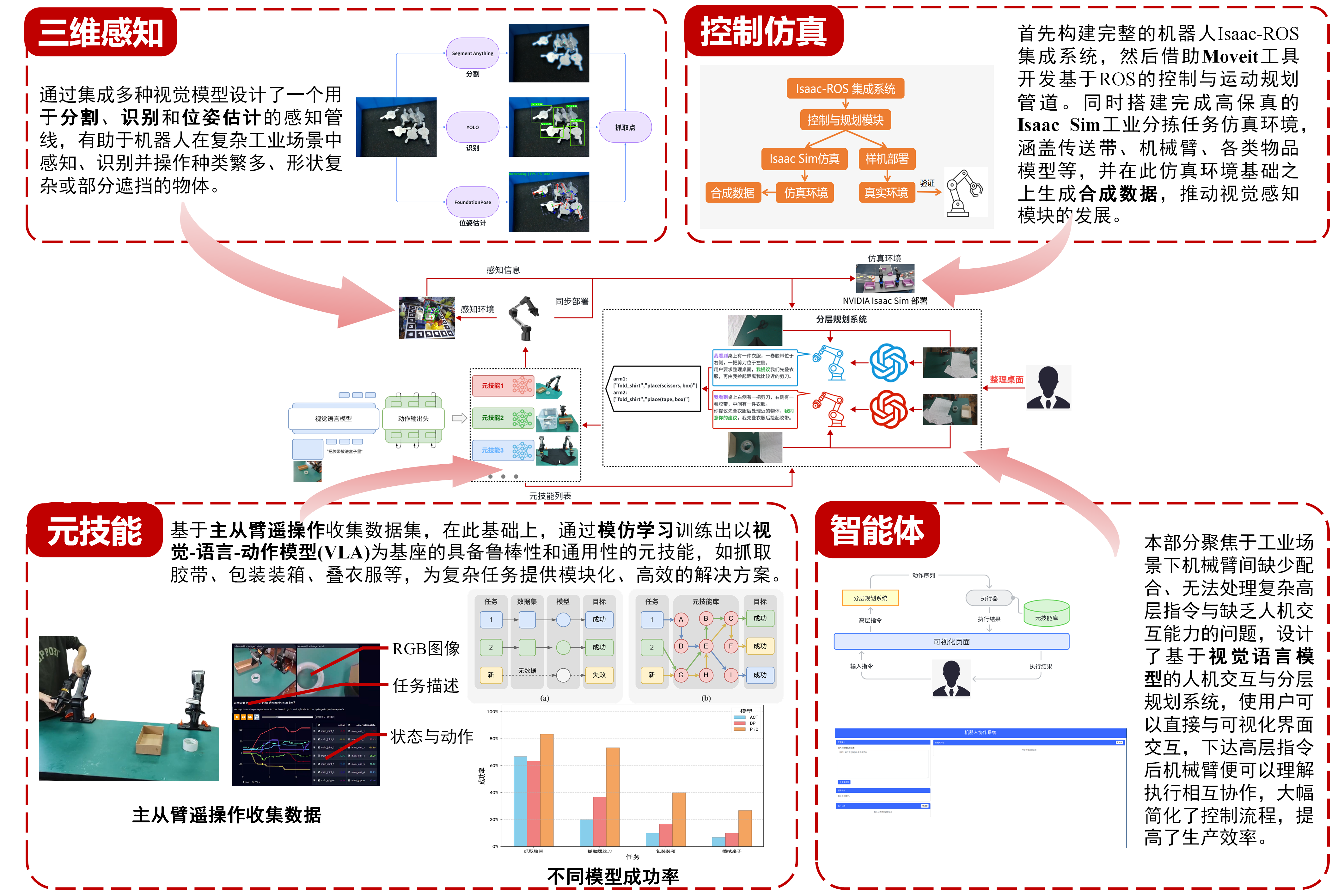
项目旨在构建一个智能驱动的多臂协作控制系统,提升工业自动化生产中的柔性分拣与复杂操作能力。为此,系统集成了四大核心模块:三维感知模块用于识别和理解复杂场景下的物体类型和形状;控制与仿真模块通过Isaac Sim和ROS进行虚拟任务训练和路径规划;元技能模块基于从人类示教中提取的操作动作,训练通用技能模型以支持多类任务;智能体模块实现人机自然交互,通过语言和视觉指令生成高层策略计划。最终目标是实现高效协同、多任务处理和人机融合的自动化系统,以适应未来智能制造的发展需求。
项目成果
项目已构建完成一套包括仿真平台与真实双臂实验平台在内的完整系统,实现了人工智能与机器人系统的深度融合。在三维感知方面,项目支持多视觉模型融合,提高了在复杂场景下的物体识别精度;控制仿真部分借助Isaac-ROS与MoveIt构建任务虚拟训练流程并生成控制数据;元技能模块成功从人类示范中提取通用技能,具备良好的迁移能力与成功率;智能体模块可通过自然语言指令与用户交互,显著提升人机协作效率。项目不仅验证了系统的可行性与实用性,也为智能双臂机械手在工业自动化领域的推广应用提供了坚实支撑。




