

磁驱动主动脉瓣置换手术机器人设计
机械工程
资助企业:
 术锐(上海)科技有限公司
术锐(上海)科技有限公司
资助年份: 2025
企业导师: 陈煜阳

指导教师: 徐凯
项目成员: 黄陈飞翔 孙修洁 邓松康
 项目海报
项目海报

 项目视频
项目简介
项目视频
项目简介
项目概述
本项目针对经导管主动脉瓣置换术(TAVR)中导丝控制灵活性较差、瓣口穿越困难等问题,设计并研发了一套基于磁驱动和模仿学习的主动脉瓣置换手术机器人系统。系统通过机械臂控制永磁铁和驱动电机实现导丝的可控运动,基于双目视觉系统实现对导丝尖端和主动脉瓣口的识别和定位,完成了从状态感知—动作决策—指令执行的完整闭环控制流程设计和搭建。系统采用模仿学习策略,基于专家演示数据完成动作策略学习,最终实现了磁控导丝对主动脉瓣口的自主精准穿越,为智能化、高鲁棒性的TAVR手术提供了系统性技术解决方案。
项目目标
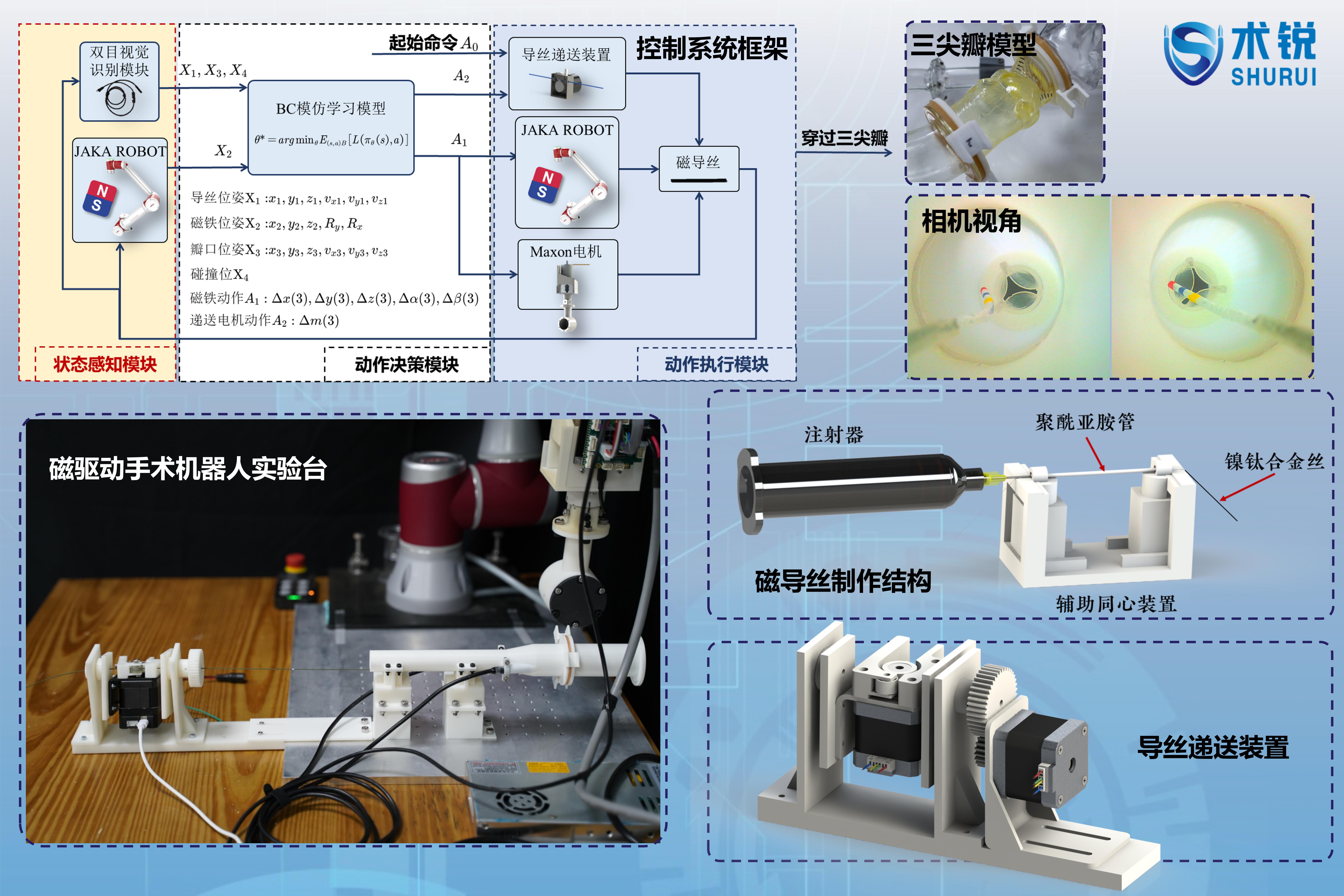
本项目旨在构建一套具备自主导航能力的磁驱动主动脉瓣置换手术机器人系统,以实现磁控导丝主动脉瓣口穿越过程的智能化替代。项目目标包括:设计和优化磁控导丝结构,使其具备优良硬磁性与柔顺性能;搭建集成双目视觉系统的血管-心脏瓣膜模拟平台,集成包含机械臂、末端旋转电机和导丝驱动电机等的多硬件控制系统;基于视觉识别结果和模仿学习策略搭建闭环控制流程,完成磁控导丝自主穿越心脏主动脉瓣口的任务,实现对磁驱动主动脉瓣置换手术机器人的手术原理性验证。
项目成果
本项目完成了磁驱动主动脉瓣置换手术机器人的硬件系统集成和自主控制软件系统搭建,实现了从状态感知—动作决策—指令执行的完整闭环控制流程;优化设计了具有高柔顺性和大角度弯曲能力的磁控导丝结构,并完成导丝在磁场下的变形仿真和实验验证;基于双目视觉系统实现了对导丝尖端和主动脉瓣口的识别和定位,对视觉识别、系统状态获取、动作控制等功能进行模块化封装;搭建专家演示数据循环采集系统,运用模仿学习策略训练系统完成自主控制磁导丝穿越主动脉瓣口的任务,验证了手术机器人系统的自主性、智能化和鲁棒性。




