

水下侦察多模式运动软体机器人
机械工程资助企业: 上海光领科技有限公司
资助年份: 2025
企业导师: 马聪敏

指导教师: 陈飞飞
项目成员: 粱博 周勇旬 王寅龙
 项目海报
项目海报

 项目视频
项目视频
 项目简介
项目简介
项目概述
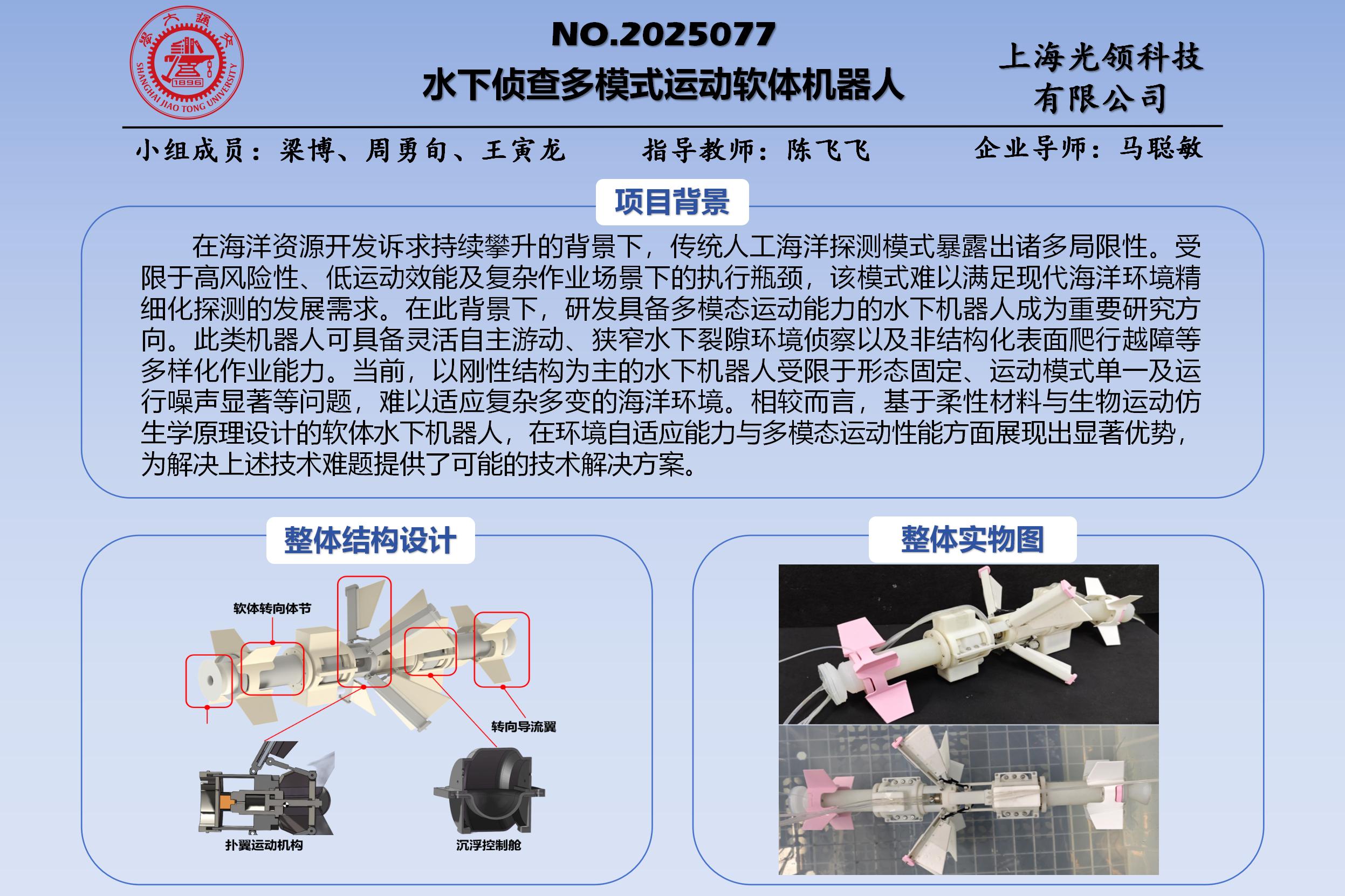
本项目针对海洋资源开发与生态保护领域对高适应性水下探测装备的迫切需求,聚焦传统人工探测及刚性水下机器人在复杂海洋环境中面临的技术瓶颈。针对传统作业方式存在人员风险高、作业效率低,以及刚性机器人运动模式单一、环境适应性不足等核心问题,本研究创新性地提出一种具有多模态运动能力的仿生软体水下机器人系统。通过融合柔性智能材料与仿生学原理,构建可自主实现自由沉浮、三维巡游及表面越障的智能作业平台,为深海科考、海底资源勘探及海洋生态监测提供新的可能技术解决方案。
项目目标
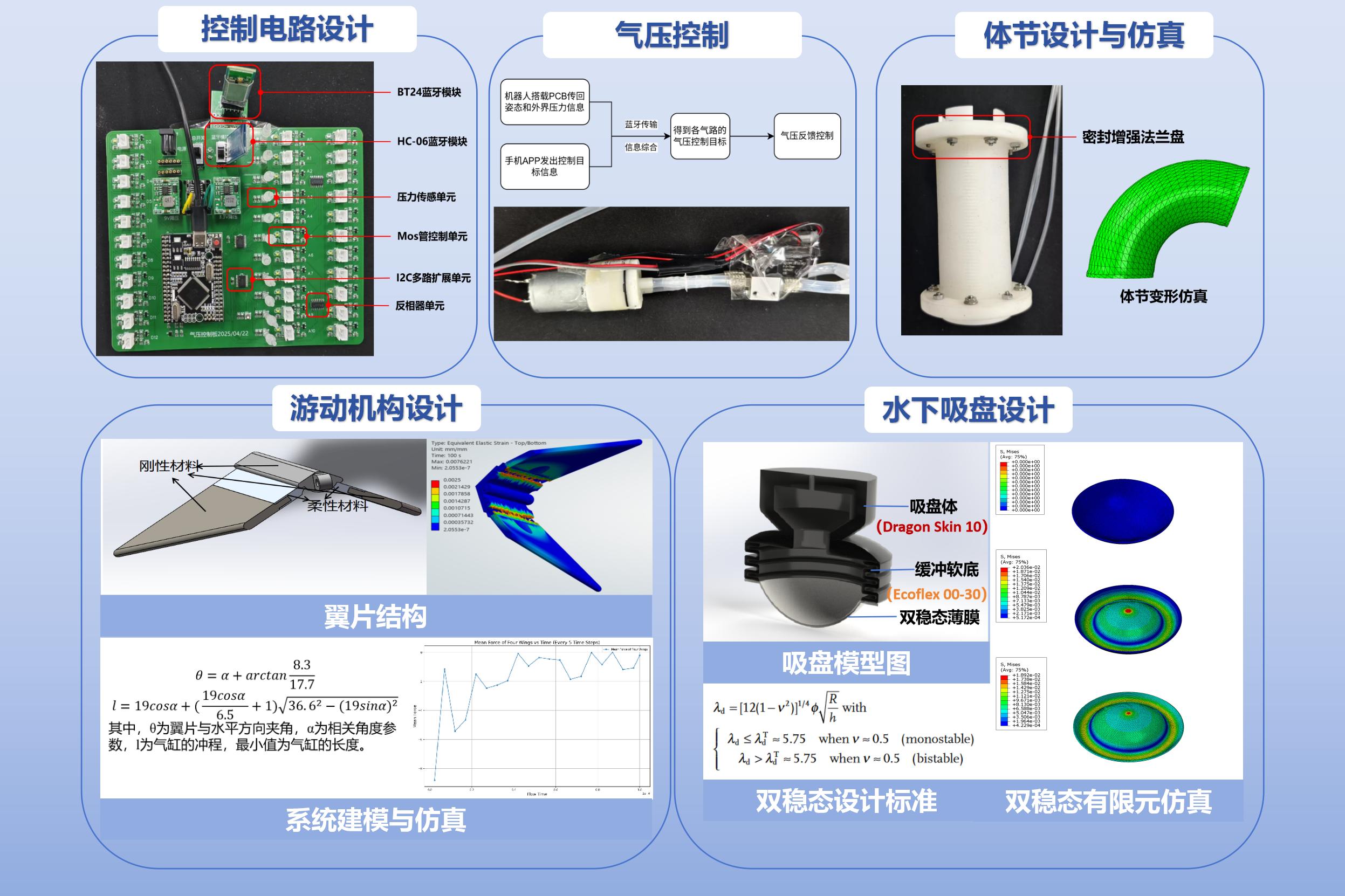
本项目以复杂水下环境侦察任务需求为牵引,着力构建具备多模态运动能力的水下软体机器人技术体系。主要研究内容包括:(1)基于仿生柔性驱动原理,研制集成水下游弋推进、目标表面吸附及爬行等多模态运动功能的软体机器人本体,通过拓扑结构优化与智能驱动控制算法开发,实现其在海洋环境中的动态适应能力;(2)研究自适应吸附实现方法,重点研究吸盘表面仿生拓扑设计、硅胶复合材料的浇注成型工艺及多物理场耦合吸附动力学表征方法,探索多模态下的吸附问题解决方案;(3)开展多模态运动协同控制研究,通过数值仿真与试验相结合的方式,评估机器人对水下目标的抵近侦察性能。
项目成果
本项目研制出一种具备三维空间多模态运动能力的仿生软体水下机器人。主要成果包括:1) 系统设计方面,研制出了总长0.486m、质量1031g的轻量化本体,通过硅胶柔性骨架与仿生扑翼的协同设计,实现前向游动;2) 驱动方式方面,设计了基于硅胶柔性材料的被动复位机构,能够在周期扑翼的复位阶段自动降低拨水面积,减少水流阻力,提升游动效率;3) 吸附系统方面,提出了具有双稳态特性的仿生吸盘结构设计,预计可通过预负压生成实现接触瞬态的被动触发式吸附;4) 运动控制方面,设计了分布式的气压输入控制系统,通过蓝牙系统进行信息同步,实现精确、便捷的正负气压控制。




