

多移动机器人协同编队搬运
机械工程
资助企业:
 上海飒智智能科技有限公司
上海飒智智能科技有限公司
资助年份: 2025
企业导师: 邹金沛

指导教师: 吴建华
项目成员: 赵四维 杨梓鸿 段延礼 孙思远
 项目海报
项目海报

 项目视频
项目视频
 项目简介
项目简介
项目概述
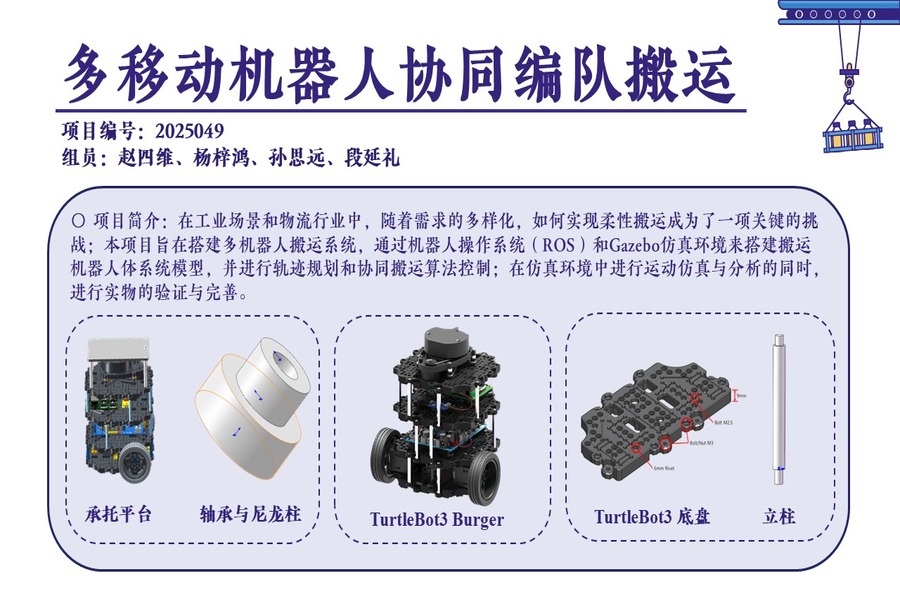
在现代工业场景中,多机器人协同搬运系统展现出广泛的应用潜力。本项目基于校企合作背景,根据飒智公司提供的设想,结合仿真环境与实际场景实验,设计搭建了一套高效、稳定、可扩展的多机器人协同搬运系统。该系统采用TurtleBot3 Burger作为驱动机器人,装载可旋转式承托结构,配合环境感知与高精度建图和定位算法、多机器人互定位算法、路径规划导航算法、协同编队控制算法,能在搬运过程中通过双轮差速驱动实现整体的平动、旋转、避障等功能。
项目目标
项目首先构建双轮差速驱动的AGV的动力学模型,设计建模并制造模块化可旋转式承托结构;结合ROS与Gazebo仿真平台,开发相应算法并验证,实现机器人基于RPLIDAR A2 360°激光扫描测距雷达的环境感知与高精度建图定位、多机器人互定位、基于栅格地图的路径规划导航、动态环境下多机器人编队控制。最终目标为构建一套高效、稳定、可扩展的多机器人协同搬运系统,并在仿真环境与实际场景中完成算法测试和搬运任务测试。
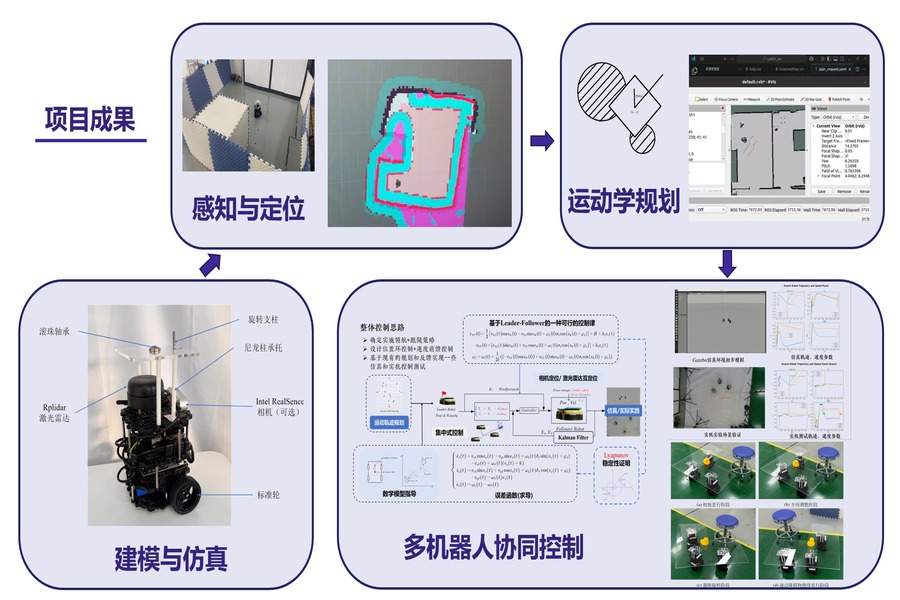
项目成果
本项目成功设计并实现了一套多机器人协同搬运系统,涵盖机器人建模、硬件平台构建、环境感知与定位、路径规划、协同控制等模块。系统基于TurtleBot3 Burger机器人,设计可旋转式承托平台,支持多机器人协同搬运重物。在定位方面,融合Google Cartographer与ICP算法,实现高精度自主定位;路径规划算法结合搬运物体具体形状与地图环境,规划合理的协同搬运路径,提升搬运效率与安全性;协同控制方面,引入Leader-Follower模型,设计相关控制律,确保机器人编队稳定。通过Gazebo仿真与实物实验验证,系统在实际环境中表现出良好的稳定性、鲁棒性与协同搬运能力。




