

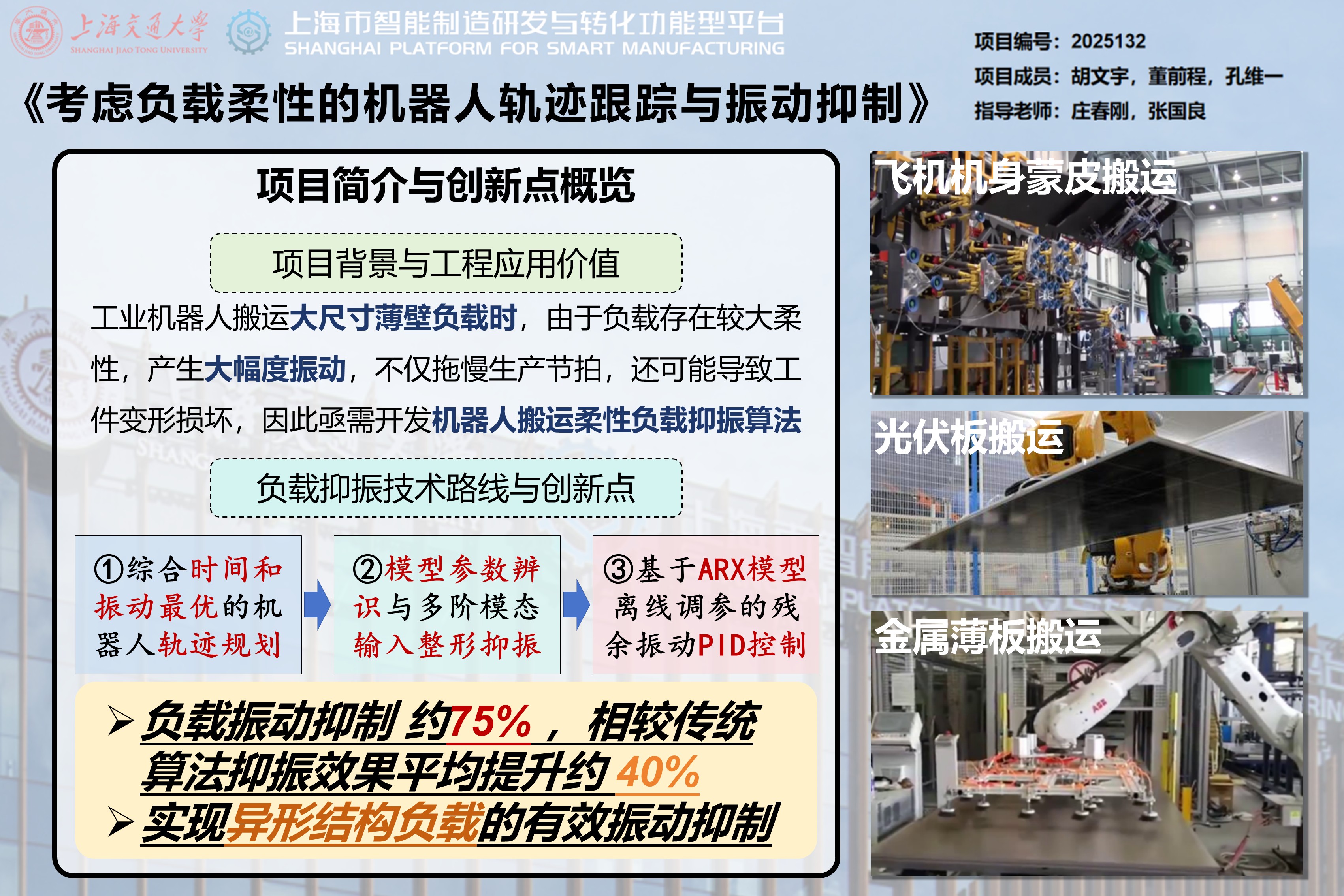
考虑负载柔性的机器人轨迹跟踪与振动抑制
机械工程
资助企业:
 上海智能制造功能平台有限公司
上海智能制造功能平台有限公司
资助年份: 2025
企业导师: 张国良

指导教师: 庄春刚
项目成员: 胡文宇 董前程 孔维一
 项目海报
项目海报

 项目视频
项目简介
项目视频
项目简介
项目概述
本项目聚焦于工业机器人在搬运大尺寸薄壁负载(如飞机机身蒙皮、光伏板、金属薄板)过程中因负载柔性引起的剧烈振动问题。柔性负载在搬运过程中容易产生大幅度振动,不仅拖慢生产节拍,还可能导致工件变形或损伤,进而降低自动化生产效率。针对这一工程痛点,项目系统性开展了柔性负载建模、轨迹规划优化、以及基于模型的振动抑制策略研究,最终实现机器人在搬运柔性负载时的高精度轨迹跟踪与高效振动控制。
项目目标
本项目旨在开发一套适用于工业机器人柔性负载搬运场景的轨迹优化与抑振控制技术,具体目标包括:(1)提出综合时间最优与振动最优的机器人轨迹规划方法;(2)基于ARX模型实现离线调参的振动抑制PID控制策略;(3)辨识薄板负载的多阶模态模型参数,实现多模态输入整形抑振(4)验证算法在搬运异形负载中的鲁棒性与实用性。通过多项关键技术协同,提升柔性负载搬运过程的控制精度与振动抑制。
项目成果
项目成功构建了柔性负载辨识与抑振控制一体化方案,实现轨迹规划与模型控制双重优化。通过多阶模态输入整形与残余振动控制,柔性负载的振动幅值平均降低约75%,相较传统算法提升约40%。该方法广泛适用于薄壁件搬运场景,显著提高了自动化搬运的安全性与效率。此外,研究成果已在多类典型负载(如异形PMMA板与6061铝合金板)实验中验证,展示出良好的通用性与工程应用前景。




