

火箭回收合作目标位姿视觉测量与作业引导技术研究
机械工程资助企业: 上海智能制造功能平台有限公司
资助年份: 2025
企业导师: 郁艳

指导教师: 陈晓波
项目成员: 石育彰,钱翰阳,黎泽鑫
 项目海报
项目海报


 项目视频
项目视频
 项目简介
项目简介
项目概述
火箭海上回收相较于陆上回收有更大的运力和经济优势,我国也计划于今年实现可重复使用火箭的首飞。但由于海上风浪大,回收船颠簸,且火箭助推器重心高易倾倒,因此实现快速、稳定的固定是确保火箭成功回收的关键。而海上恶劣的环境,如多雾、多雨等,都对传统的测量方式提出了挑战,目前国内并没有一套成熟的助推器固定系统。因此,本项目旨在实现对助推器上对接机构的快速准确识别,引导AGV机器人进行固定作业。
项目目标
项目将分为合作目标位姿单目视觉位姿测量、合作目标三维视觉测量技术和视觉测量系统集成标定三个部分开展研究。利用三维视觉与单目视觉分别独立解决AGV机器人对火箭对接机构的识别,并利用相关算法实现去雾等效果,以适应海上可能存在的恶劣环境;集成标定解决视觉系统标定,手眼标定,为后续机械臂的运动进行指导。最终,项目还会研制视觉测量与作业引导样机系统,开展研究成果的应用验证。
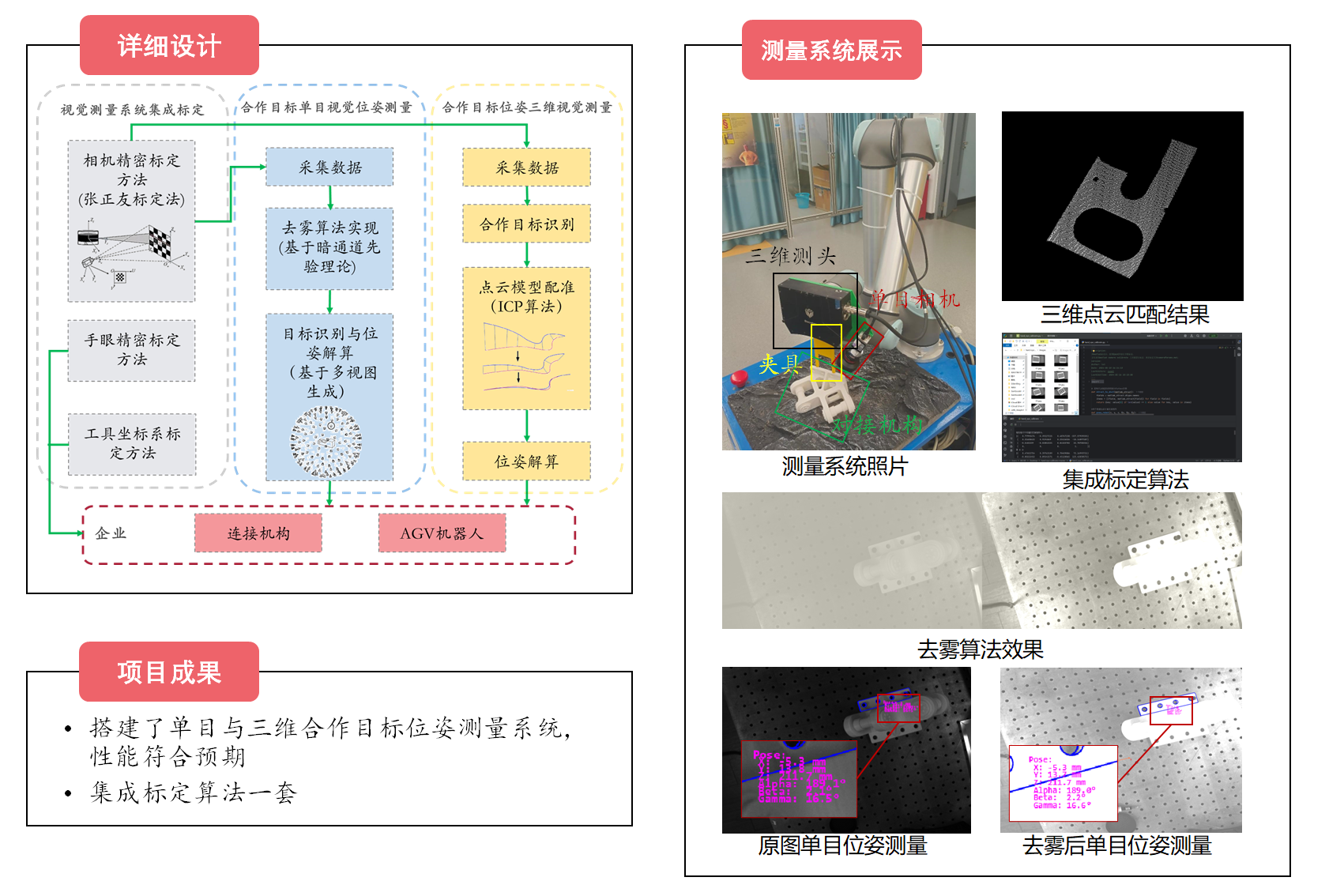
项目成果
项目提出了单目与三维测量两种视觉路线进行合作目标的位姿测量,并利用集成标定的方法实现了视觉系统精密标定与手眼和工具坐标系的标定,为AGV机器人的固定作业实现了引导功能。同时,本项目还设计出了一套视觉测量与作业引导样机系统对模型进行了测量与验证,实现了毫秒级的稳定测量。此外,还针对多雾情况研究算法进行去雾,保证了在恶劣的环境、多噪声情况下系统的稳定性。




