

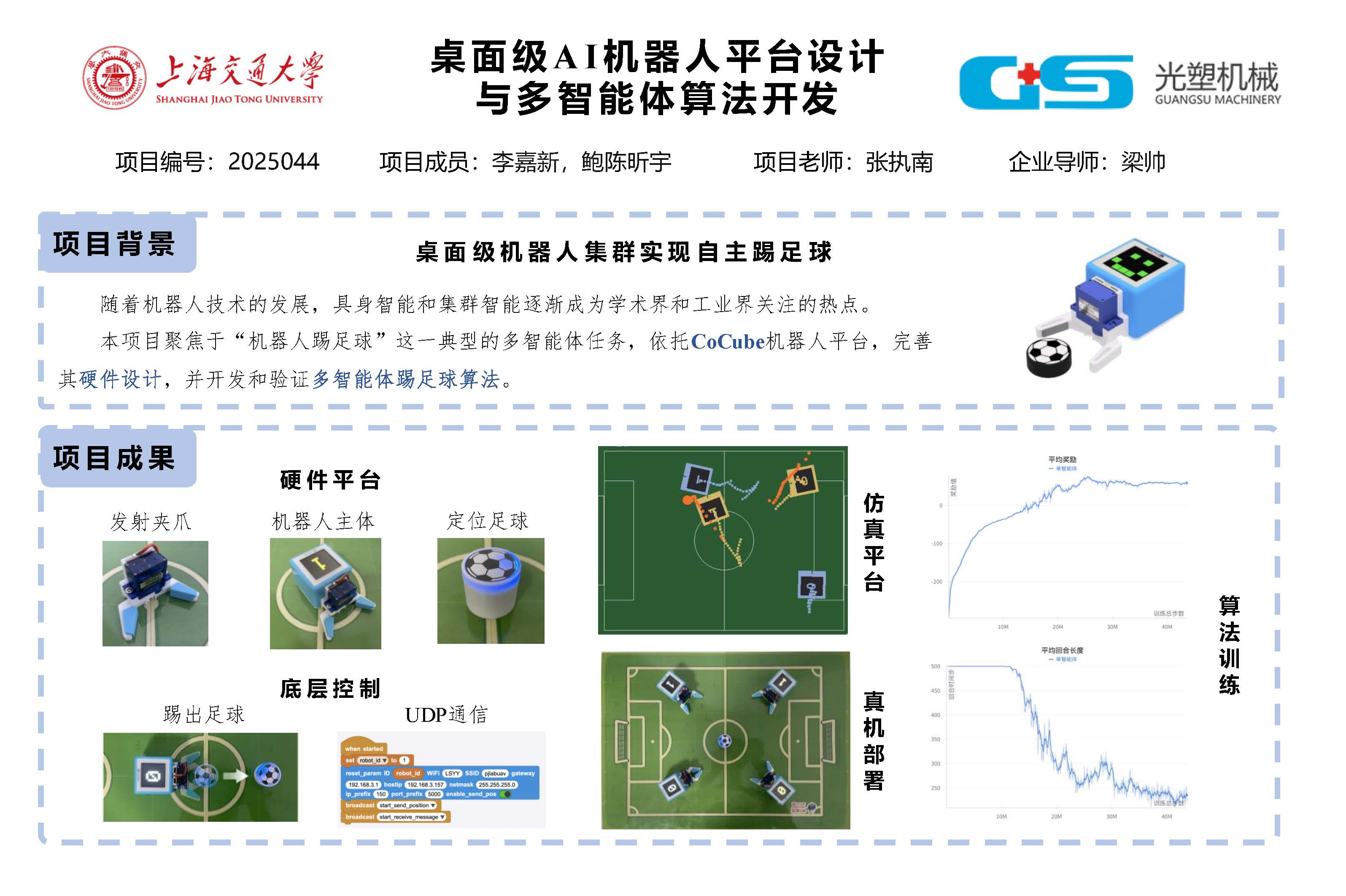
桌面级AI机器人平台设计与多智能体算法开发
机械工程资助企业: 上海光塑机械科技有限公司
资助年份: 2025
企业导师: 梁帅

指导教师: 张执南
项目成员: 李嘉新,鲍陈昕宇
 项目海报
项目海报

 项目视频
项目视频
 项目简介
项目简介
项目概述
随着移动机器人技术的蓬勃发展,具身智能与群体智能逐渐成为学术界和工业界的研究热点。机器人足球作为一种典型的多智能体协同动态任务,环境变化迅速、反馈稀疏且具有延迟性,因而蕴含丰富的理论价值与广阔的应用前景。本项目以机器人踢足球任务为研究对象,旨在提升机器人在动态场景下的自主决策与团队协作能力。研究内容包括基于相关机器人平台的硬件与外部模块设计、面向 ODE 引擎的高效仿真环境构建,以及强化学习多智能体控制策略的训练与真机部署。
项目目标
完善硬件生态
构建并集成支持完成桌面机器人踢足球任务的关键硬件模块,确保系统稳定可靠。构建仿真平台
搭建高效、可扩展的机器人足球仿真环境,用于多智能体踢足球算法训练和测试。设计控制框架
基于强化学习算法,开发多智能体踢足球任务的训练框架,并最终得到有效的多智能体控制策略。真机验证
在桌面真实机器人平台上部署并评估控制框架,验证系统的可行性和稳定性。应用系统开发
打通云端与移动端接口,实现对机器人任务的远程监控与管理,提升用户使用体验。
项目成果
硬件设计与测试
完成发射夹爪和定位足球硬件的设计与测试,实现了真机环境下稳定可靠的发射与识别功能。仿真平台搭建
基于 ODE 引擎搭建兼容 gymnasium 与 AEC 接口的仿真平台,实现高效多智能体物理模拟与训练。策略训练成果
采用自对弈、课程学习及奖励塑形技术,成功训练出高效多智能体协作踢球策略,在仿真环境中表现优异。




