

内舱操作机器人创新设计
机械工程
资助企业:
 上海赛威德机器人有限公司
上海赛威德机器人有限公司
资助年份: 2025
企业导师: 郑开云

指导教师: 王皓
项目成员: 李松源 陶涵 丁柯杭 聂根瑜
 项目海报
项目海报


 项目视频
项目视频
 项目简介
项目简介
项目概述
在双层底船舶结构中,格子舱结构既是船体支撑结构也是船体隔离结构,涉及船体多个关键部位,对于船舶的稳定性起到重要作用。一艘普通的双层底轮船大约有100~250个底内舱,其中存在对接焊缝漏焊、内部缺陷、裂缝、生锈等情况,需要工人定期自己进入空间狭小、地形复杂的船舱内对船体进行检测、探伤、维护工作,这种方式对于人力资源消耗大,效率低且空间可达性差,因此急需开发一系列稳定性强、维护效率高的船舱爬壁机器人来代替人力作业。
项目目标
本项目旨在项目组中的每个成员根据不同的焊接场景分别设计针对弧形表面的单自由度焊缝跟踪焊接机器人、针对直角焊缝的双磁吸爬壁焊接机器人、针对过焊孔处焊接的仿人机械臂焊接机器人、针对底内舱越障的钻孔机器人,用以替代船舶内舱恶劣环境下的人工作业。这些机器人相较于传统人工作业,既节省了人力成本,效率也显著提升,工作过程的安全性也能得到保障,对维护船舶结构的稳定性具有重要作用。
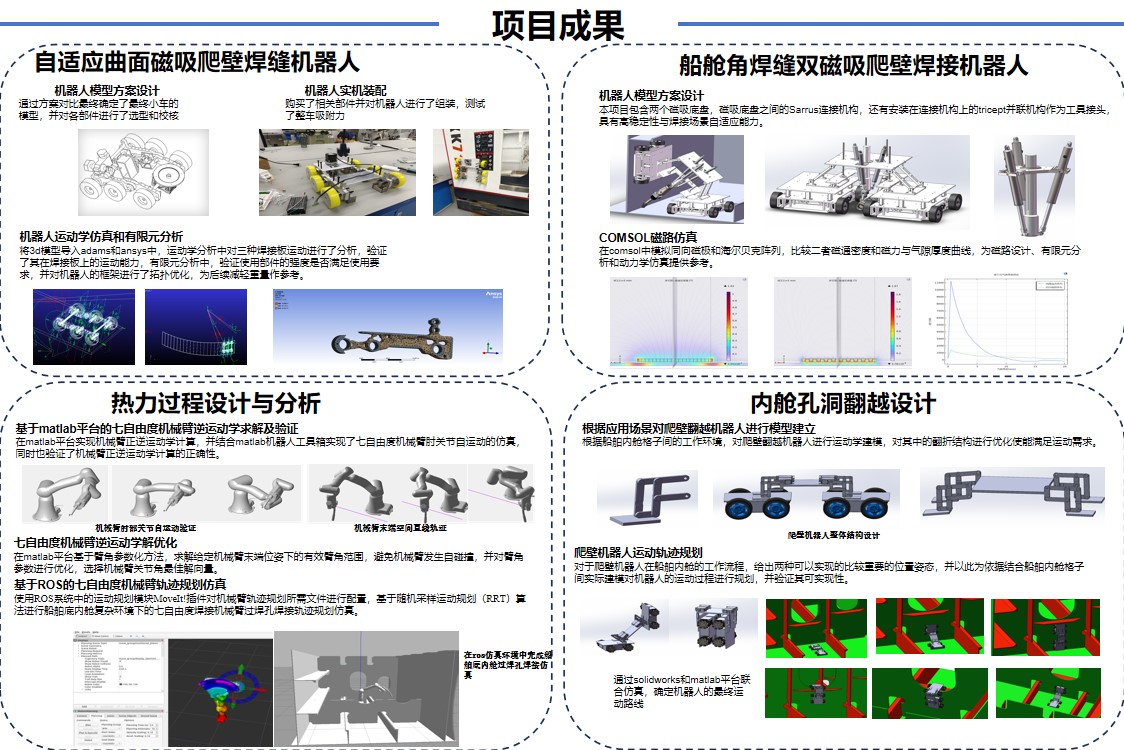
项目成果
对于自适应曲面磁吸爬壁焊缝机器人,目前已完成机器人的模型方案设计,对其进行了运动学仿真和有限元分析,并进行了机器人的实机装配;对于船舱角焊缝双磁吸爬壁机器人,目前完成了机器人的模型方案设计以及COMSOL磁路仿真;对于过焊孔仿人机械臂焊接机器人,完成基于matlab平台的七自由度机械臂逆运动学求解及验证,对七自由度机械臂逆运动学解优化,并基于ROS的七自由度机械臂轨迹规划仿真;对于内舱翻越穿孔机器人,目前完成了机器人的整体模型建立,并通过运动仿真对机器人翻越底舱障碍的运动进行了路径规划。




