

面向空间机器人的智能三维视触觉传感器
最佳展示奖
资助企业:
 湖南郎灵科技有限公司
湖南郎灵科技有限公司
资助年份: 2025
企业导师: 王金行

指导教师: 胡开明
项目成员: 向芮伽 冯世威 张璐瑶
 项目海报
项目海报

 项目视频
项目简介
项目视频
项目简介
项目概述
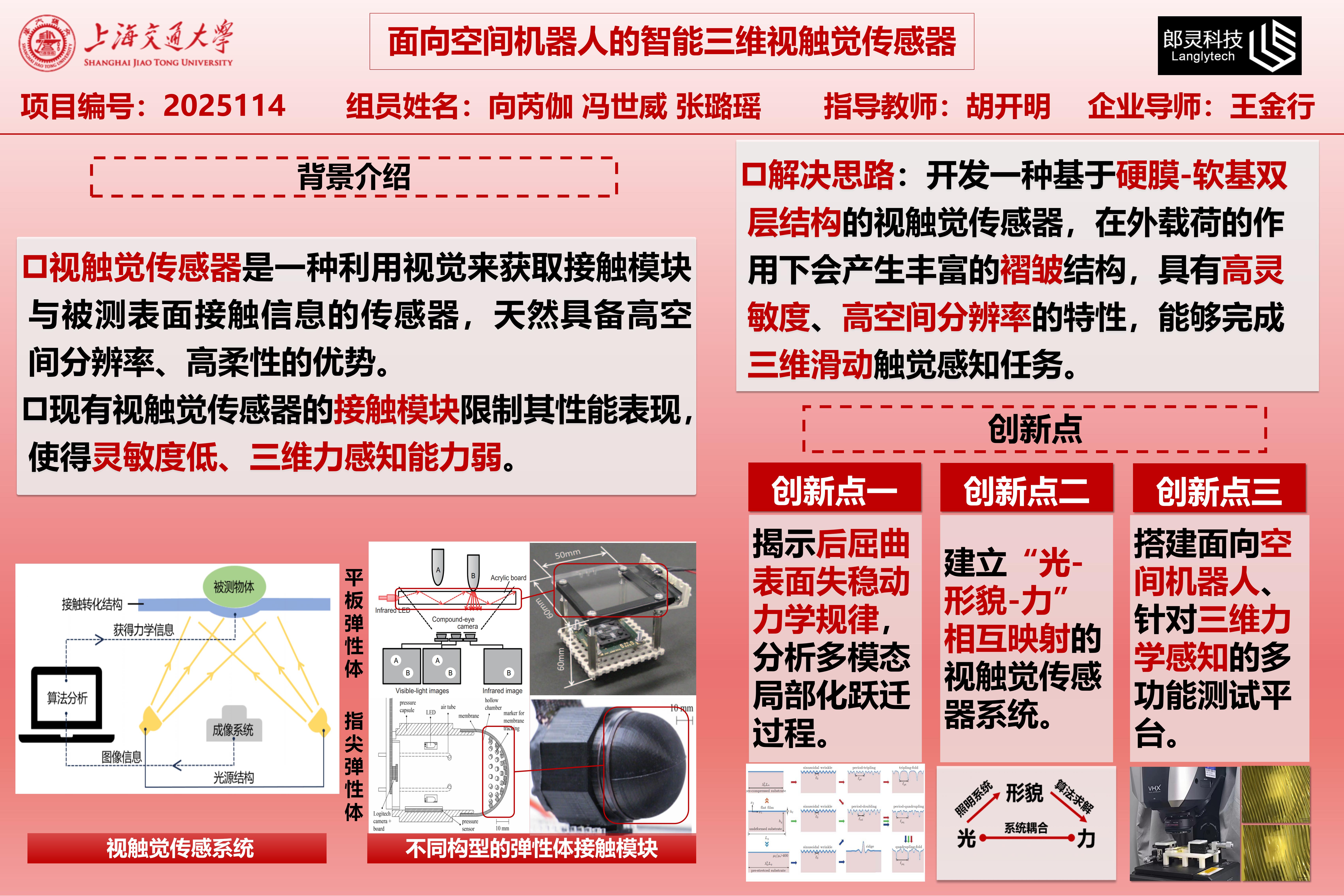
现代航天领域中,空间机器人因承担空间站维护、卫星检修及太空碎片清理等任务,亟需具备高精度三维触觉感知能力以应对非合作目标的复杂交互。然而,现有触觉传感器在空间分辨率、柔性曲面适应性与三维力学解耦方面仍存在明显不足。为此,本项目提出基于表面失稳力学自组装微纳结构的新型三维视触觉传感器,通过双层膜基系统的褶皱动态响应实现高灵敏度、高空间分辨率的触觉感知,其特有的屈曲变形机制可有效适应复杂曲面的三维滑触力检测需求。
项目目标
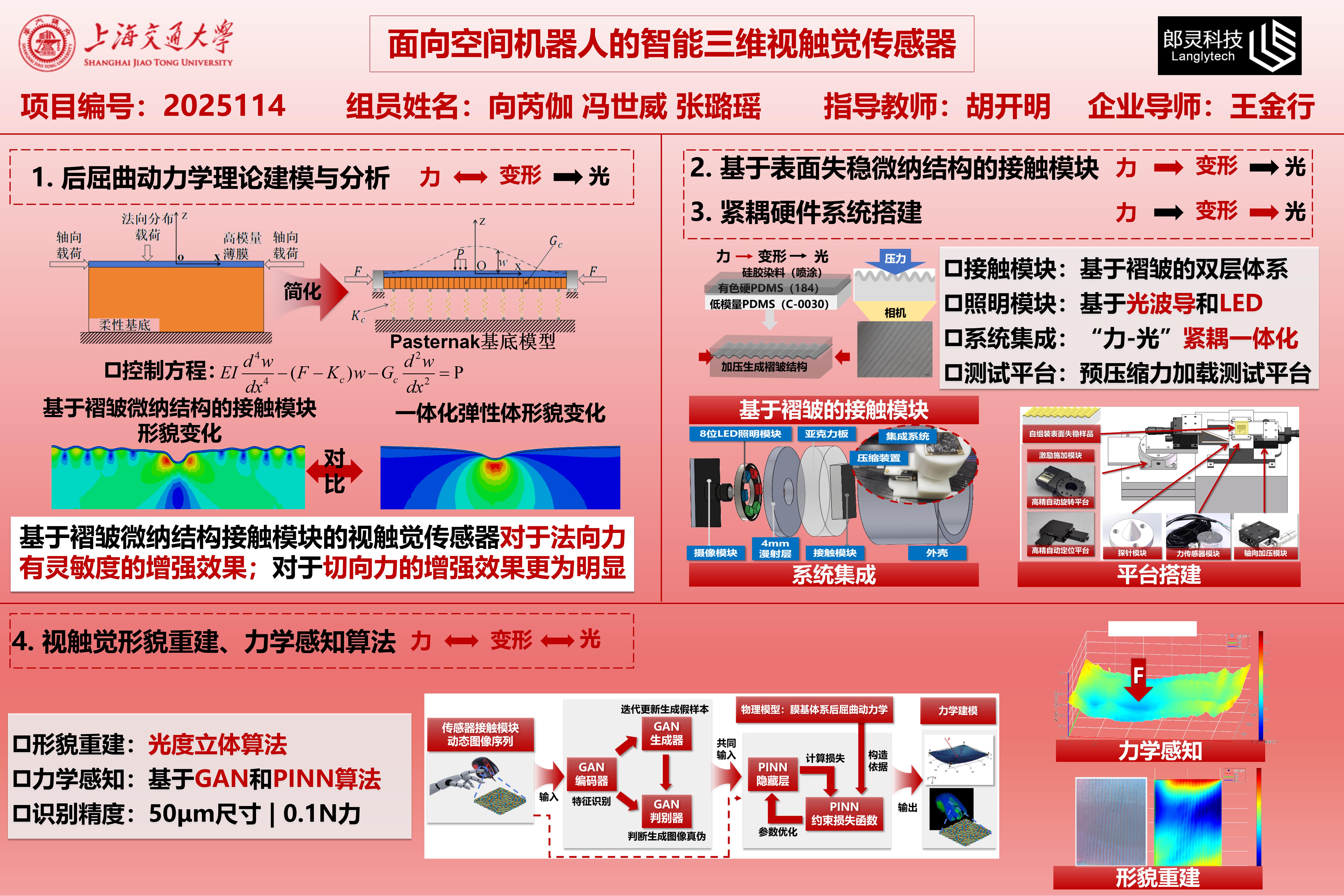
理论分析建模部分是传感器搭建前的理论基础,研究失稳微纳结构的多模态跃迁数值模拟分析和失稳动力学分析为视触觉传感器提供基础支撑;接触模块是传感系统核心,设计好光路与摄像的集成也是项目的难点所在;感知算法需要高效率处理摄像模块的复杂图像并完成褶皱三维结构的识别和力学感知分析。所设计的传感器系统整体应满足各项应用指标,具备较好的高空间分辨率和灵敏度,并能完成若干工程环境下的具体任务。
项目成果
本项目建立了三维滑动接触下膜基系统后屈曲静力学和动力学理论模型,结合有限元仿真与微纳压痕实验揭示应变能主导的多模态跃迁规律。其次集成了RGB光波导照明与摄像模块的视触觉系统,利用褶皱形变的光学编码特性实现接触力的多维度解析。开发了基于GAN和PINN的触觉力重构算法,通过耦合理论模型与实验数据实现三维接触力的高精预测。研究突破传统传感器刚性结构限制,创新性地将力学失稳转化为感知优势,设计可扩展应用于空间机器人末端执行器,为在轨服务的自主化升级提供核心技术支撑。
本项目正在撰写SCI论文1篇、国家发明专利2项。




