

顺应-感知-驱动一体化柔性调姿机构设计与开发
最佳展示奖
资助企业:
 沐驰智能科技有限公司
沐驰智能科技有限公司
资助年份: 2025
企业导师: 周林

指导教师: 陈根良
项目成员: 吴晨昊,吴欣怡,沈杰
 项目海报
项目海报

 项目视频
项目简介
项目视频
项目简介
项目概述
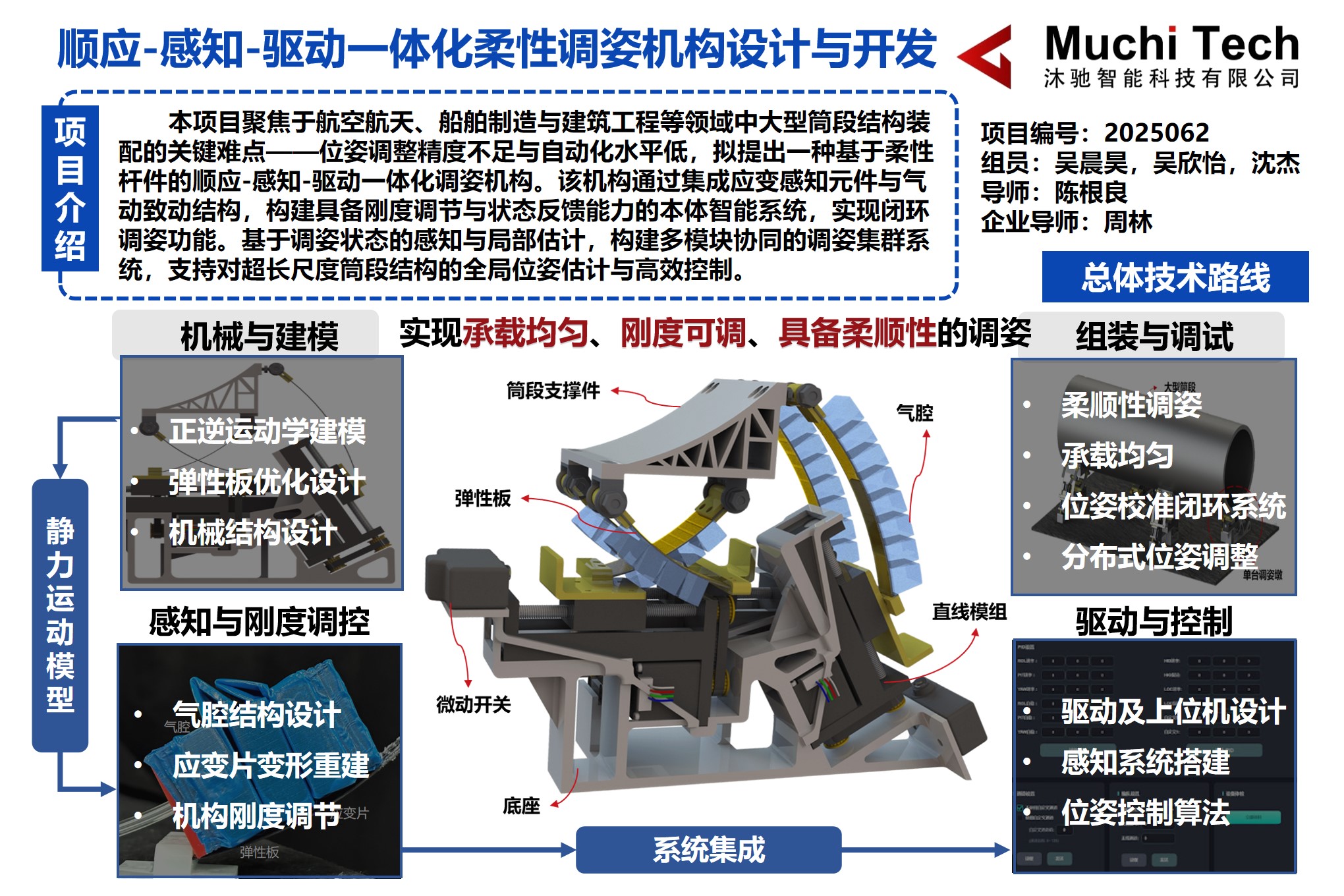
本项目聚焦于航空航天、船舶制造与建筑工程等领域中大型筒段结构装配的关键难点——位姿调整精度不足与自动化水平低,拟提出一种基于柔性杆件的顺应-感知-驱动一体化调姿机构。该机构通过集成应变感知元件与气动致动结构,构建具备刚度调节与状态反馈能力的本体智能系统,实现闭环调姿功能。基于调姿状态的感知与局部估计,构建多模块协同的调姿集群系统,支持对超长尺度筒段结构的全局位姿估计与高效控制。
项目目标
项目总体目标是开发桌面级调姿机构。
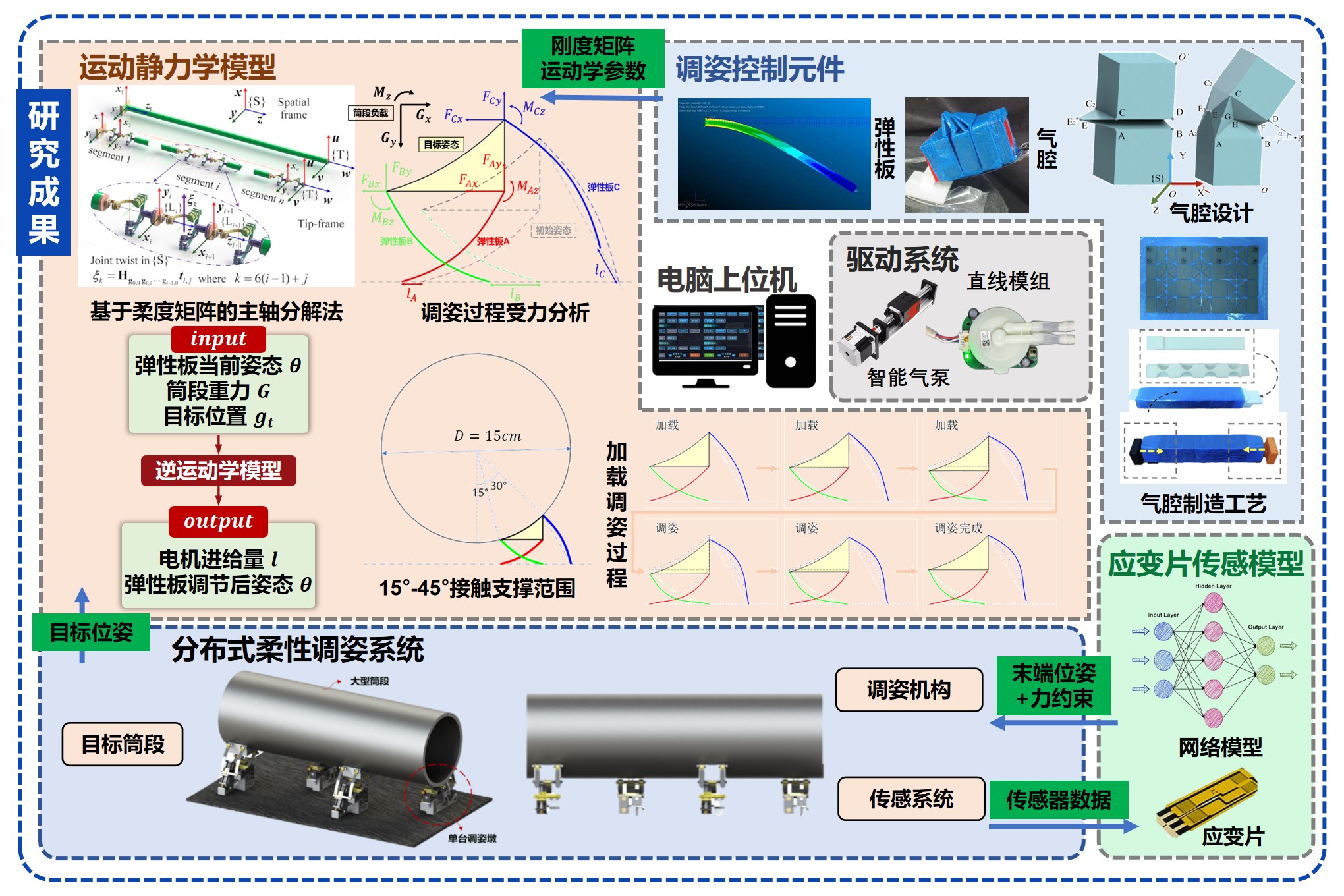
1)整机的结构设计和运动学和动力学分析。建立大挠度柔性杆件单元的静力学模型以及并联柔顺调姿机构运动-静力模型,并完成机构的整体结构设计。
2)气腔制造和刚度分析。完成气腔的设计与制造,并建立气动单元和柔性杆的运动学模型和组合刚度模型。
3)控制算法和系统集成。实现对气泵和电机驱动元件的同步控制,根据调姿机构的任务要求,结合应变片的感知数据,开发一体化闭环控制算法。
项目成果
本项目设计并开发了一种顺应-感知-驱动一体化的柔性调姿机构,由四个单台调姿墩协同完成调姿任务。单台调姿墩包含了柔性杆件、气腔、应变片、直线模组和筒段支撑件等主要结构。通过读取应变片的数据可以获取弹性板的变形状况,可以计算得到支撑件上所承受的力,同时可以通过控制模块调节气泵和直线模组的输出量,实现刚度的调控和单台墩调姿机构位姿的调节。最终将通过四台调姿墩的协同控制实现大型筒段的调姿功能。




