

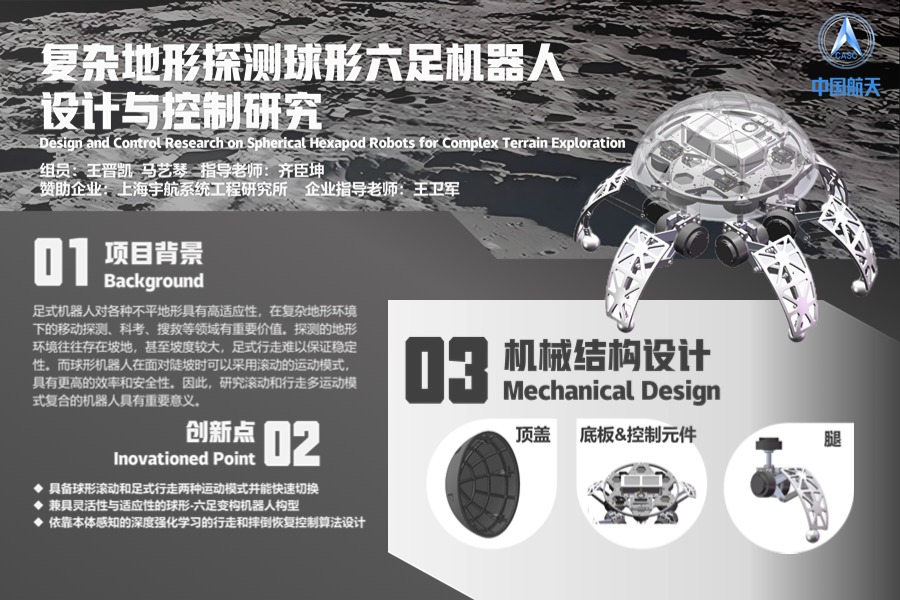
复杂地形探测球形六足机器人设计与控制研究
最佳展示奖
资助企业:
 上海宇航系统工程研究所
上海宇航系统工程研究所
资助年份: 2025
企业导师: 王卫军

指导教师: 齐臣坤
项目成员: 王晋凯 马艺琴
 项目海报
项目海报

 项目视频
项目简介
项目视频
项目简介
项目概述
面向我国月面探测任务,针对月面复杂地形通过和探测需求,有必要研究具有复合移动模式的月面探测小型机器人。六足爬行、球形滚动复合式机器人可探测多种复杂地形,具备六足爬行模式稳定性高、越障性能好、适于崎岖松软地形探测以及球形滚动模式沿坡面滚动能耗低、速度快的优点,本项目以此为背景进行球形-六足变构机器人的开发。
项目目标
本项目聚焦于研发一款具备六足爬行与球形滚动复合移动能力的创新型机器人,首先需完成多模式运动机构设计:构建可切换爬行与滚动形态的六足本体结构,通过关节联动机构实现足式支撑与球体闭合的形态转换,兼顾足式运动的越障灵活性与球形滚动的高效移动特性。同步进行虚拟仿真与验证:利用多体动力学软件建立机器人虚拟模型,仿真不同地形下的运动轨迹、能耗特性及稳定性,优化机构参数与控制逻辑。最终需完成物理样机研制与实验:集成轻量化机身、低功耗驱动模块与自主控制软件,验证复合移动模式的可靠性。
项目成果
(1)完成六足爬行、球形滚动复合式机器人机械设计,包括移动机构和结构设计,开展移动模式仿真,进行机构和结构优化,获得驱动电机参数并完成选型。(2)完成六足爬行、球形滚动复合式机器人控制设计,包括控制硬件、算法和软件设计,开展机器人控制仿真,提出适用于复合移动模式的机器人运动控制算法,包含六足爬行模式的移动控制、球形滚动模式的移动控制等。(3)研制出六足爬行、球形滚动复合式机器人样机1台,开发出控制软件1套,开展实验验证研究,验证机器人的功能和性能,完成研究报告1份。




