

大口径光学非球面的机器人智能抛光系统研制
“优秀设计”优胜奖
资助企业:
 航勒普科技(苏州)有限公司
航勒普科技(苏州)有限公司
资助年份: 2025
企业导师: 曹利

指导教师: 李洲龙
项目成员: 林兆帆、李浩宇、黄开宇
 项目海报
项目海报
 项目视频
项目简介
项目视频
项目简介
项目概述
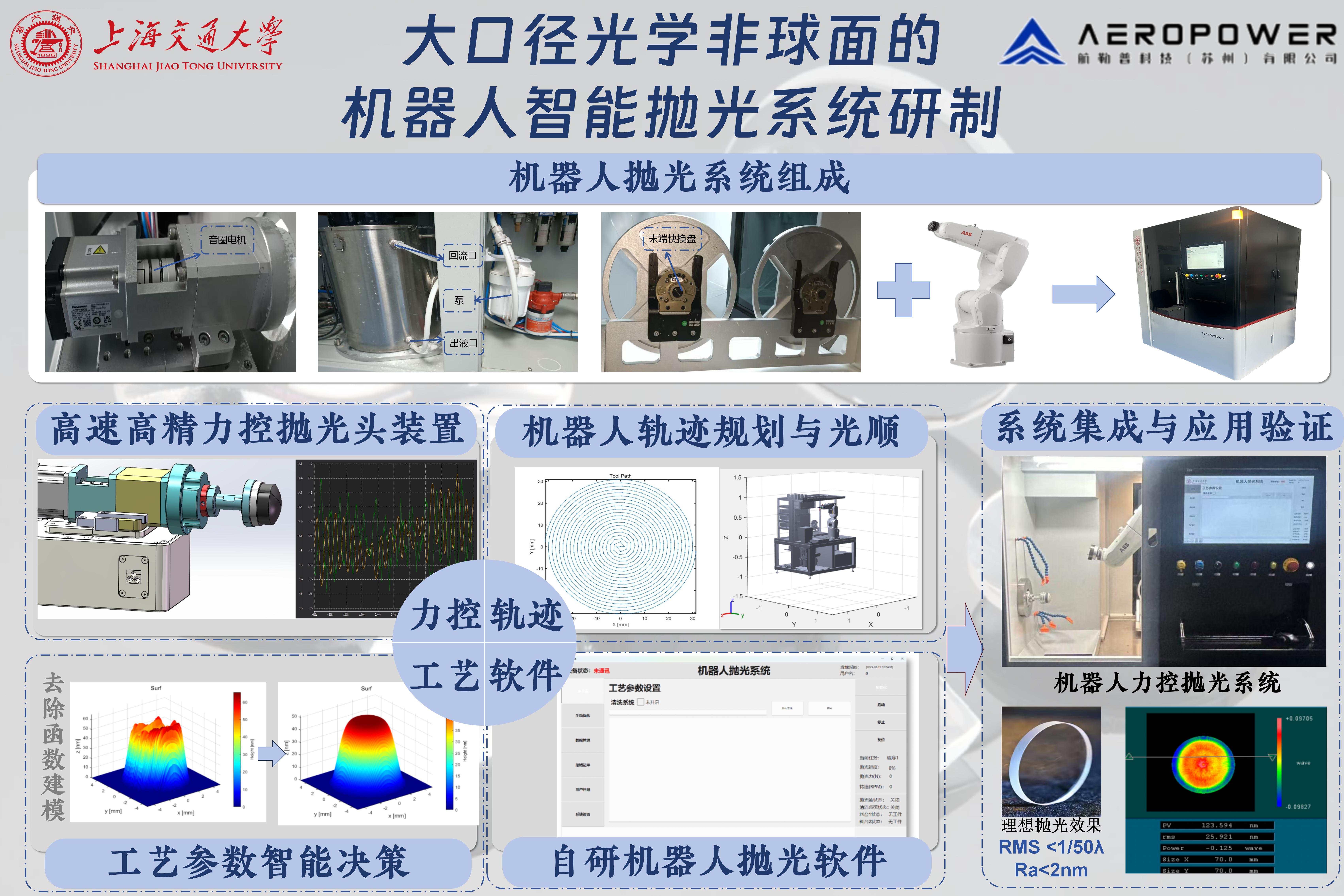
大口径非球面光学元件广泛应用于精密光学系统,对其高面型精度加工具有重要产业价值。
本项目拟构建面向大口径光学非球面的机器人智能抛光系统,并开发配套的工艺优化与控制软件。项目将从抛光路径规划与优化、恒力控制系统搭建与自适应智能控制算法开发、去除函数建模与工艺参数优化等方面开展研究。通过软硬件系统集成,实现对非球面表面的高效高质抛光加工。最终实现面形 RMS < 1/50λ的加工指标,推动机器人在超精密光学制造中的应用。
项目目标
本项目旨在构建基于六自由度机器人臂的柔顺力控非球面抛光系统,实现大口径非球面元件的高精度加工。目标包括建立非球面抛光系统模型与轨迹规划算法,优化螺旋路径并补偿中心区域过抛,设计恒力控制系统与自适应智能力控算法,提升力控精度与稳定性;通过抛光去除函数建模与标定,建立材料去除率与表面粗糙度预测模型,最终构建多目标工艺优化与智能决策系统,实现RMS<1/50λ的加工指标。
项目成果
本项目构建了面向非球面元件的机器人柔顺力控抛光系统,实现了光学元件高效、高质的超精密抛光。工艺上,建立了基于关键工艺参数的材料去除模型,设计参数优化算法以推荐最优组合。力控方面,改进了机器人末端执行器并提出基于模糊逻辑控制的自适应力控算法,实现恒力控制。轨迹规划方面,创新地采用阿基米德螺旋轨迹并优化中心区域速度控制,提高了速度跟踪精度。实验结果证明能有效降低表面RMS与PV值,提升面型精度。




