

模块化刚软外骨骼机器人
“优秀设计”优胜奖
资助企业:
 上海智能制造功能平台有限公司
上海智能制造功能平台有限公司
资助年份: 2025
企业导师: 孙亮

指导教师: 费燕琼
项目成员: 吴非凡 许辰 李育阳 郭俊茜
 项目海报
项目海报

 项目视频
项目简介
项目视频
项目简介
项目概述
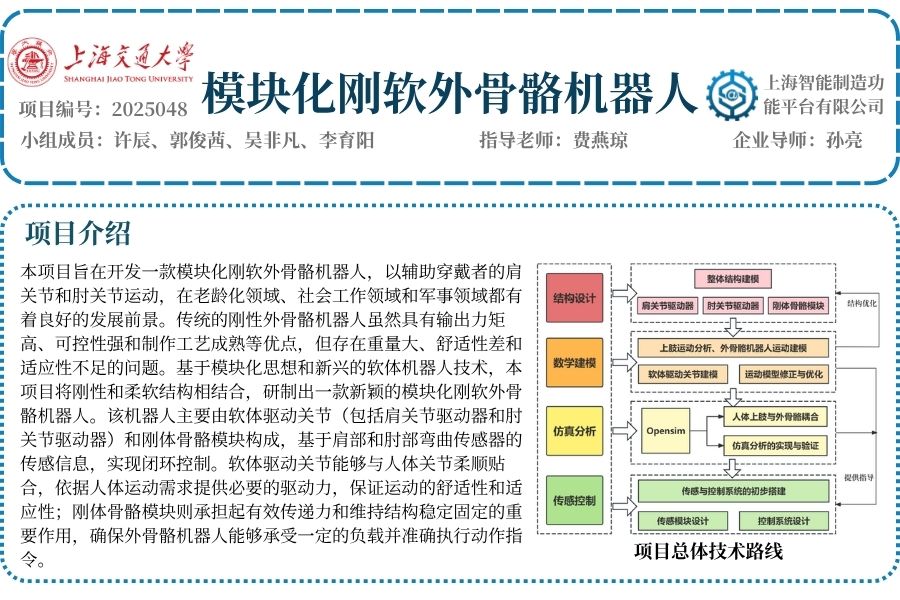
随着科技的不断进步,外骨骼机器人作为一种新型的可穿戴设备,不仅能够为人体提供保护支撑,还可以提升运动能力,在老龄化护理、工业辅助以及医疗康复等领域具有广泛应用。
在实际应用中,传统的刚性外骨骼机器人重量大、舒适性差和适应性不足的问题逐渐凸显。而柔性外骨骼凭借其采用的柔性执行器,在人机交互性方面表现出色,能有效避免结构和人体转动中心错位,减少肌肉消耗和代谢成本。同时,由于柔性材料具有良好的柔韧性、可塑性以及缓冲吸振性能,柔性执行器能更好地模拟人体肌肉运动特性,降低外骨骼运动对人体的冲击力。
项目目标
制作肩、肘关节刚软外骨骼,实现对肢体有效的力矩输出,从而可以在康复乃至更多领域发挥作用;实现协调控制,使各模块既能独立执行特定动作,满足多样化的功能需求,又能协调配合,模拟人体自然的肩、肘关节运动模式,为穿戴者提供高效、自然的运动辅助。
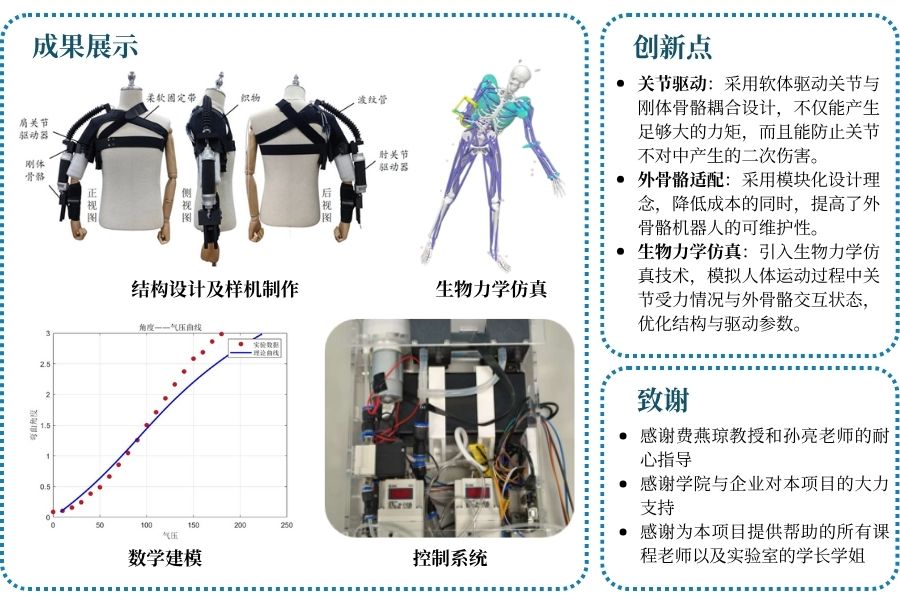
项目成果
制作了模块化刚软外骨骼机器人样机,实现了外骨骼按照规定路径的运动控制以及镜像控制,并且结合力学理论以及仿真软件验证了方案的可靠性与优越性。




