

地下巡检机器人协同定位与建模系统
“优秀设计”三等奖
资助企业:
 长江电力
长江电力
资助年份: 2025
企业导师: 黄雄

指导教师: 董伟
项目成员: 何梓嘉、陈宇轩
 项目海报
项目海报

 项目视频
项目视频
 项目简介
项目简介
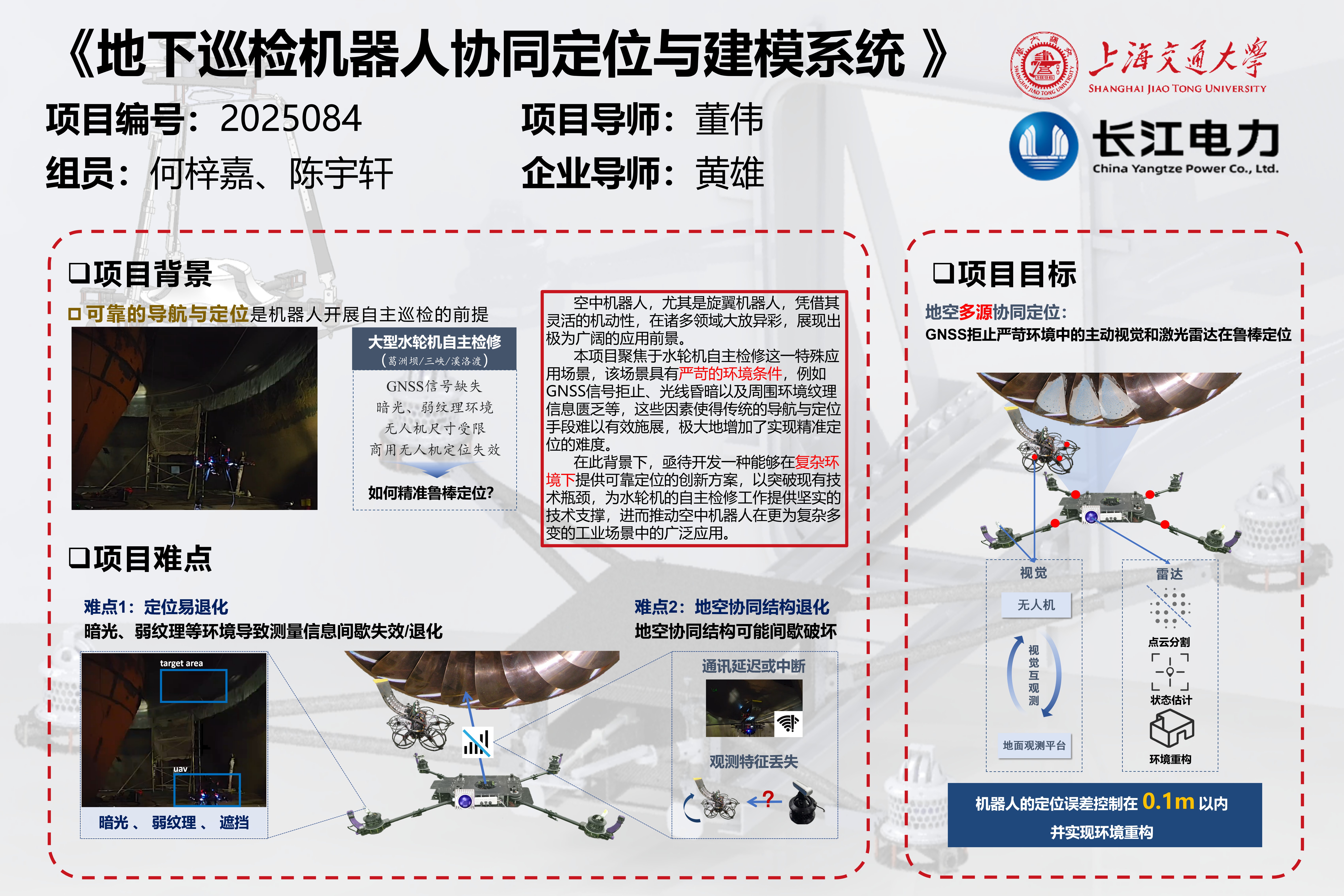
项目概述
针对地下大型基础设施巡检需求,本项目研制了空中机器人协同定位与建模系统,解决了地下环境中机器人定位与导航的难题。本项目关键技术包括为在暗光环境下利用主动视觉与激光雷达融合进行空中机器人状态估计与环境重构。在视觉方面,开发了具备大范围动态目标跟踪能力的主动视觉系统,使协同机器人能够互相观测并提供高精度定位;在激光雷达方面,开发了点云处理系统提升目标点云质量,能够有效提高定位精度和改善表面重构效果。最终,通过滑动窗口降维估计器融合来自视觉和激光雷达的估计结果,从而提高了定位系统的鲁棒性。
项目目标
(1)基于视觉的无人机状态估计
在地面布置多台主动视觉相机,建立多自由度运动学模型,提出协同调度方法,确保定位精度与跟踪稳定性。利用无人机上的红外标记特征,采用PnP算法实现6D状态估计(位置和姿态),并通过机载与地面互观测系统进一步提升精度。性能要求:水平与垂直定位误差(RMSE)均小于0.1m。
(2)基于激光雷达的状态估计与环境重构
地面激光雷达通过点云滤波投影确定无人机位置,结合卡尔曼滤波实现状态估计;采用MLS平滑点云,结合kD最近邻搜索三角化重构环境表面。性能要求:状态估计精度优于0.1m。
项目成果
在暗光环境下开发主动视觉定位方法,建立机载视觉定位系统与地面主动视觉定位基站之间的互相观测机制,实现空中机器人6D状态估计,并通过多相机协同调度提高定位精度;开发基于激光雷达点云的状态估计系统,并利用多传感器融合方法将系统误差控制在0.1米以内;建立基于激光雷达的三维重建方案,用于辅助损伤定位和后续维护。上述研究成果已在三峡、葛洲坝、溪洛渡等大型水电站中进行了验证,为严苛环境下机器人的自主作业提供了一种新的定位方法,并具有在能源设施维护、灾害救援等领域推广应用的潜力。




