

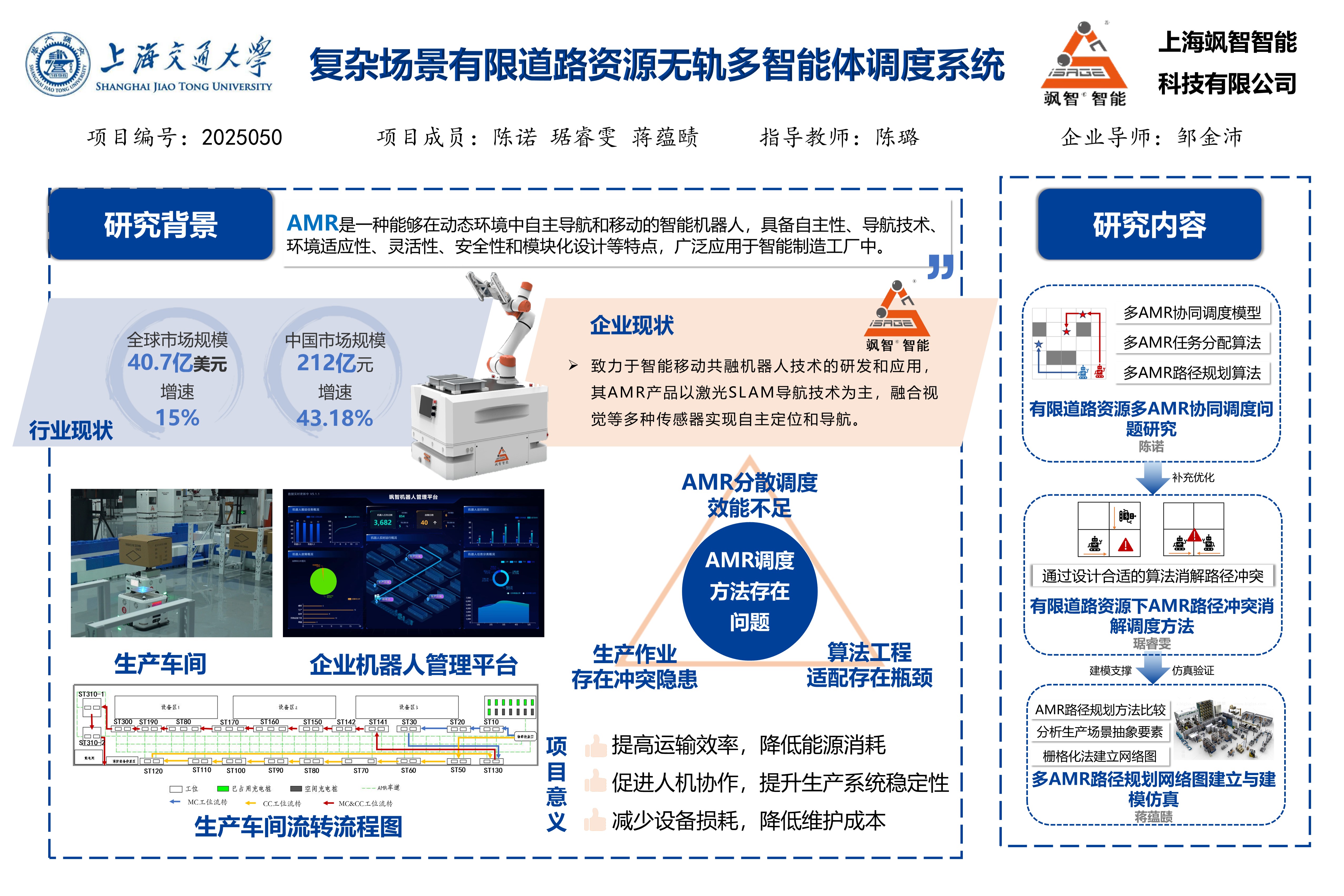
复杂场景有限道路资源无轨多智能体调度系统
“优秀设计”二等奖
资助企业:
 上海飒智智能科技有限公司
上海飒智智能科技有限公司
资助年份: 2025
企业导师: 邹金沛

指导教师: 陈璐
项目成员: 琚睿雯 蒋蕴赜 陈诺
 项目海报
项目海报

 项目视频
项目简介
项目视频
项目简介
项目概述
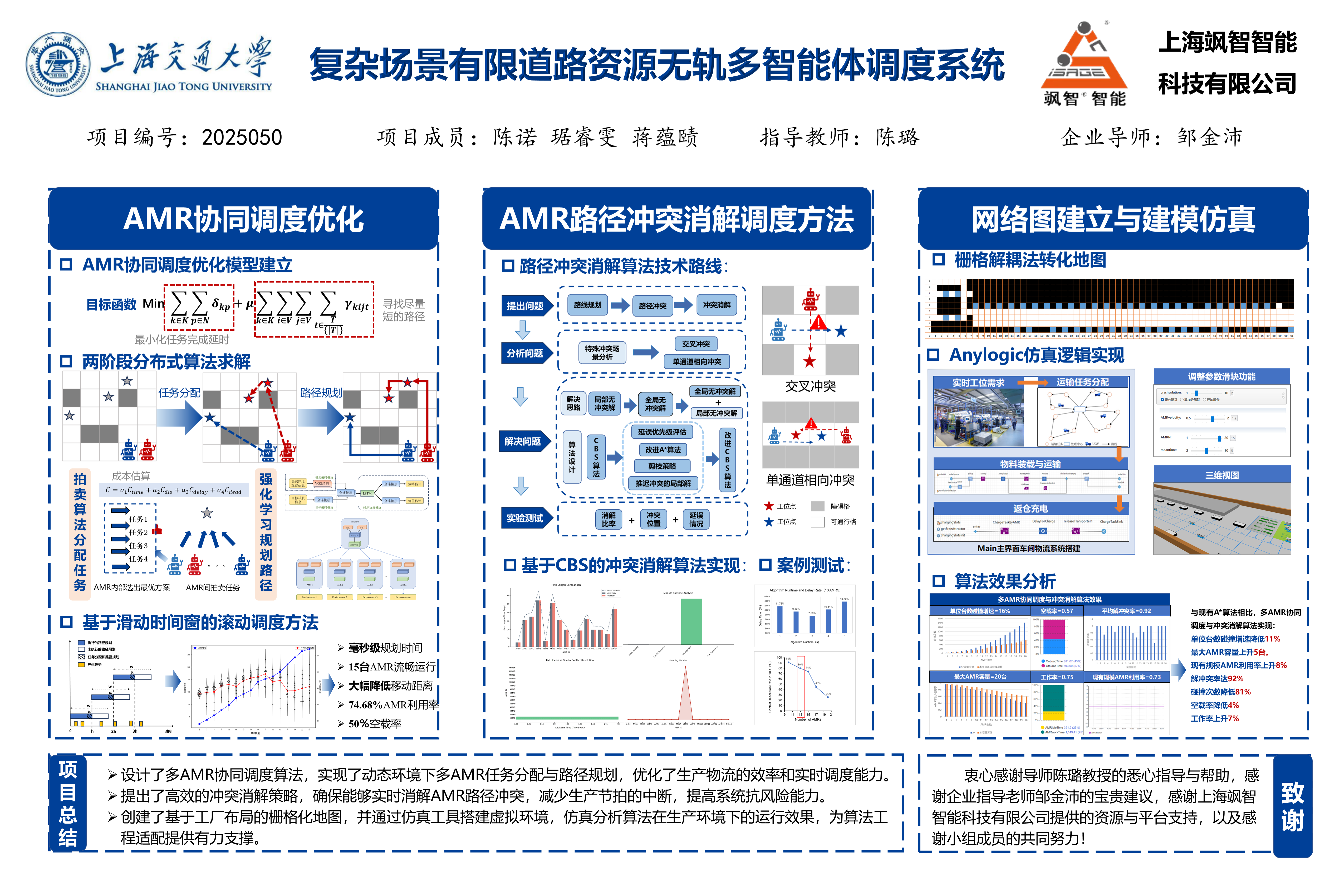
企业为智慧工厂提供的方案中,多AMR的调度系统存在显著的优化空间,,针对其AMR路线规划柔性不足、多AMR运行效率低下、实际生产存在路径冲突风险等不足,设计了基于滚动时间窗的多AMR协同调度算法与冲突消解全局优化算法,并进行了仿真验证,力求为企业提供有效的技术支撑。
项目目标
1. 开发有限道路资源下多 AMR 协同路径规划,提升计算效率与响应速度,实现任务自动分配与路径规划。
2. 设计实时、高效的路径冲突消解算法,避免AMR因路径冲突导致设备死锁影响生产节拍,保证生产顺利进行。
3. 通过仿真测试,评估算法有效性、适应性和鲁棒性,推动算法落地应用,为智慧工厂物流方案定制提供高效解决方案。
项目成果
1.设计开发基于滚动时间窗的多AMR协同调度算法,能够根据生产任务动态更新AMR作业调度,基于强化学习的算法能够实现不同生产场景的迁移。
2.设计开发冲突消解全局优化算法,能够在毫秒级内实现AMR运输路径冲突消解,并能够实现冲突消解后多AMR的全局优化。
3.设计开发基于Anylogic的仿真模型,对算法进行仿真评价,并考虑AMR运行速度、充电等实际需求。




